

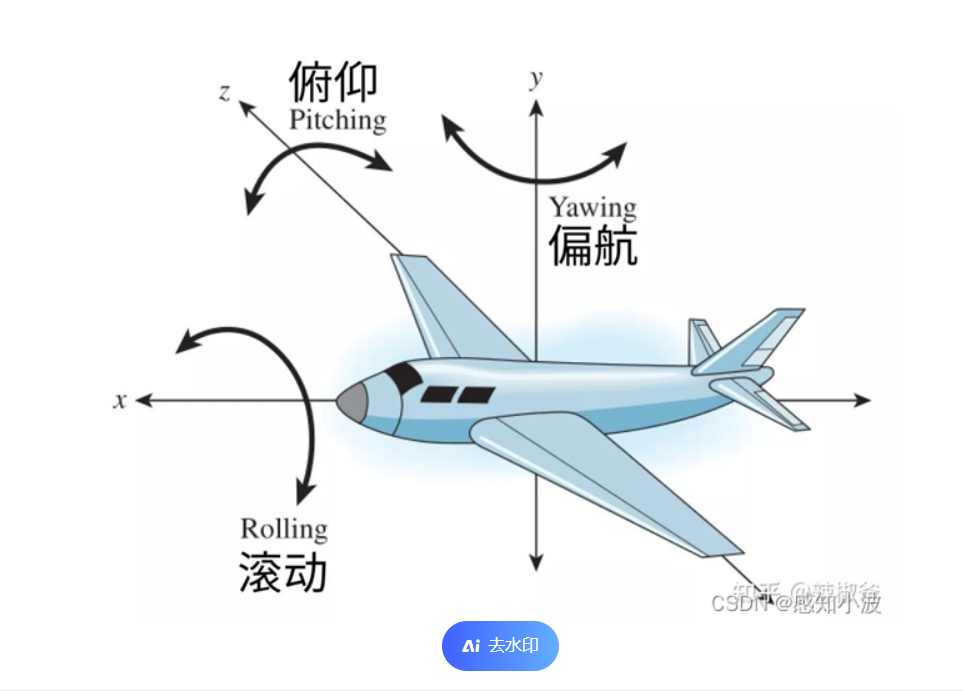
1. 四旋翼无人机飞行原理:欠驱动系统
通过4个电机的转速,来控制飞行器X、Y、Z轴的加速度和角速度,实现悬停、垂直升降、俯仰、偏航、滚转(这里只对比较陌生的俯仰、偏偏行、滚转做示意图说明)。
![图片[1]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401124318140-93328251.png)
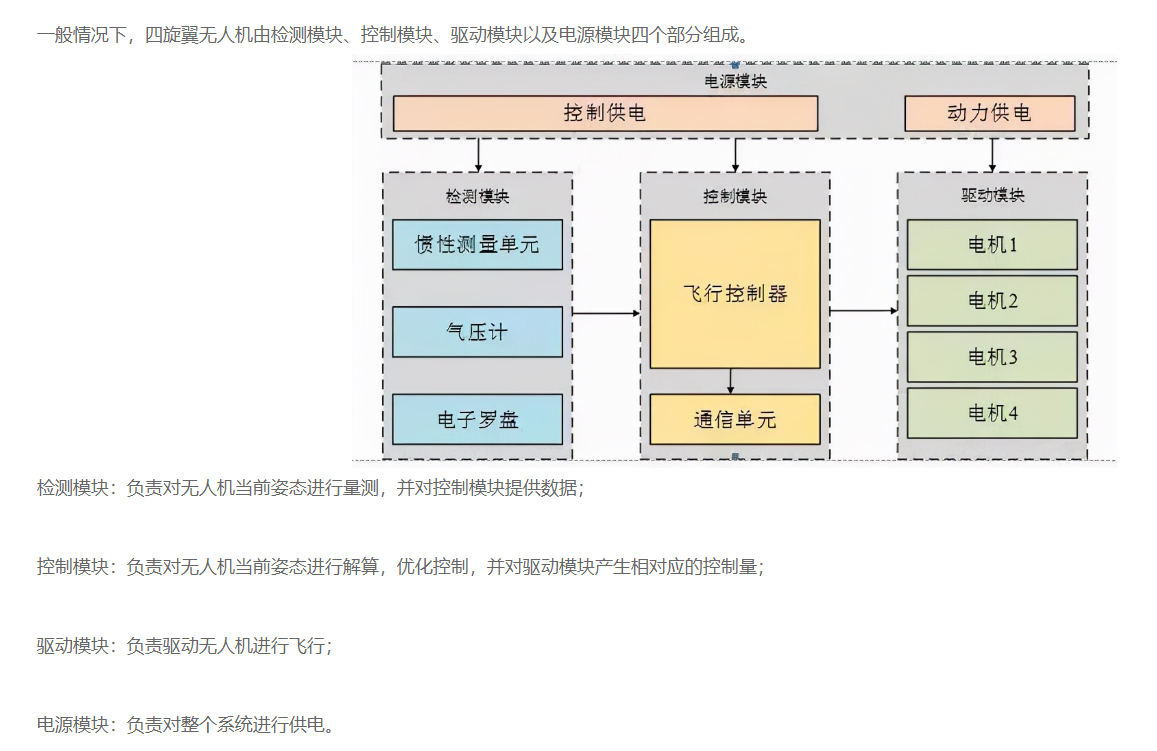
组成
运动控制
运动控制主要参考:四旋翼无人机飞行原理及控制方法,你了解多少?
实物图

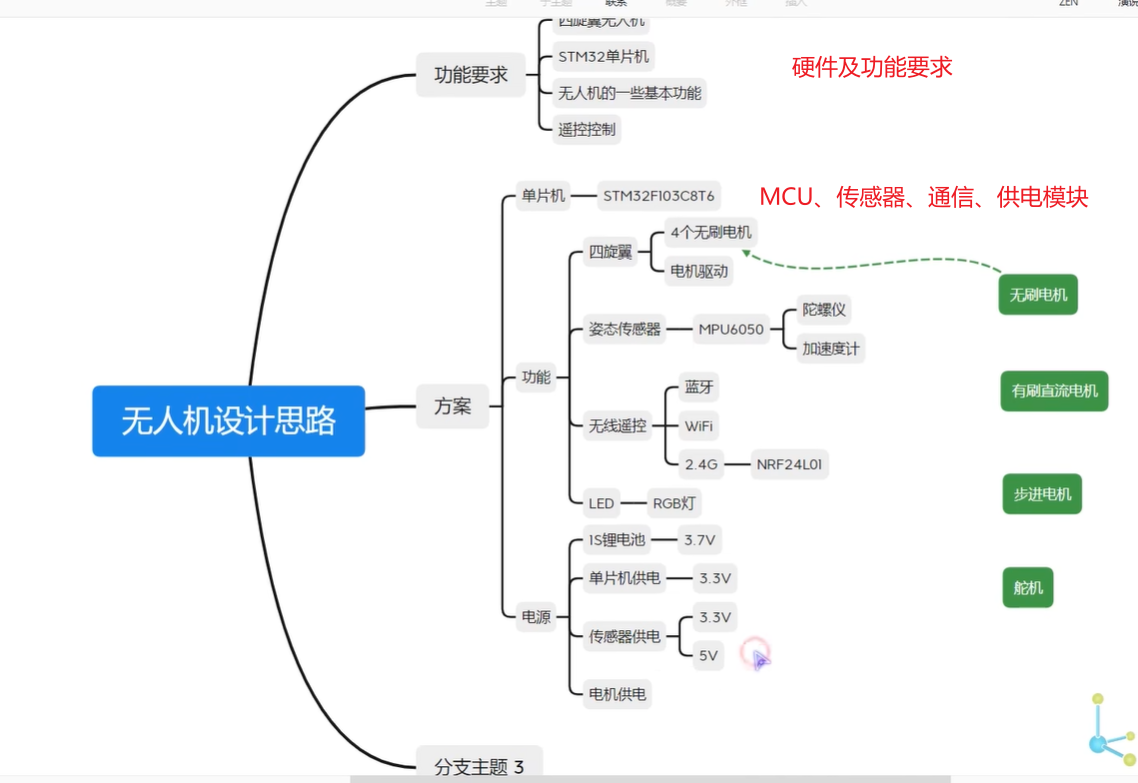
2. 无人机设计思路
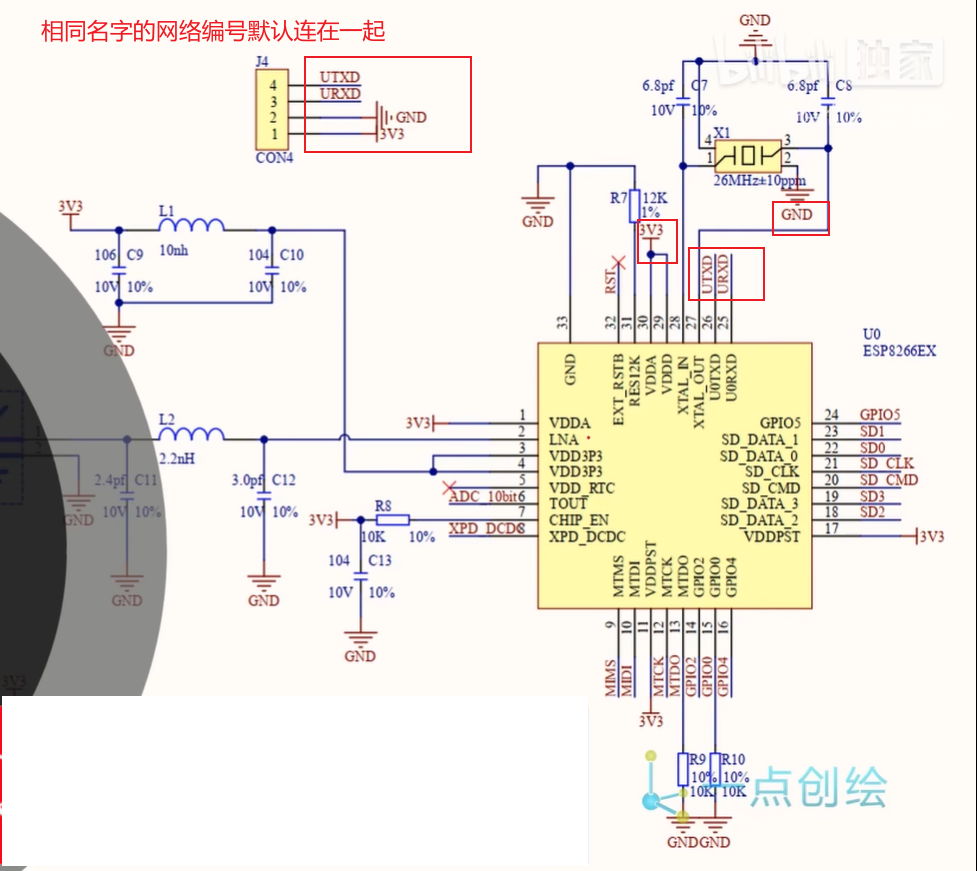
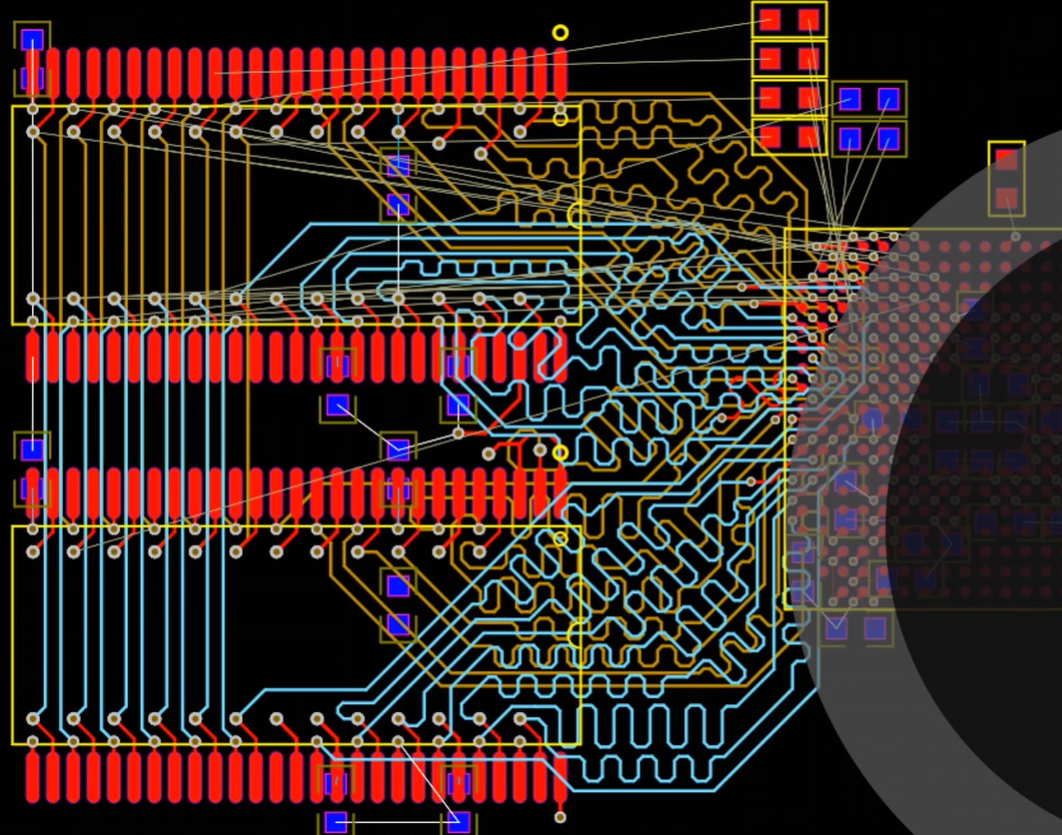
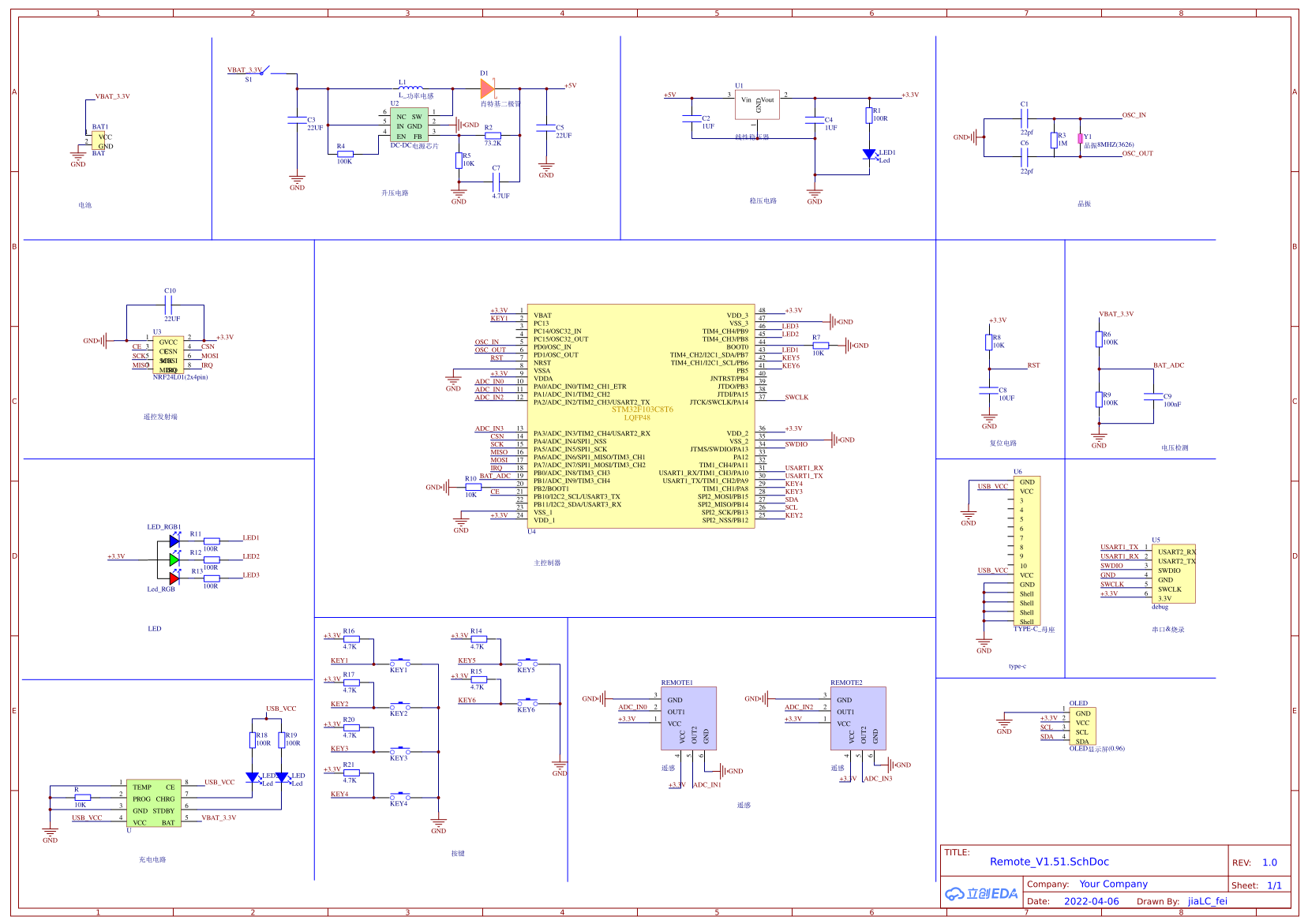
3. 原理图和电路
注意,电路图为上图,而实际设计电路时电路结构复杂,因此通常会用网络编号来来代表不同电路间的连接关系。相同网络编号的端子默认连在一起。
![图片[2]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401131821871-800467529.png)
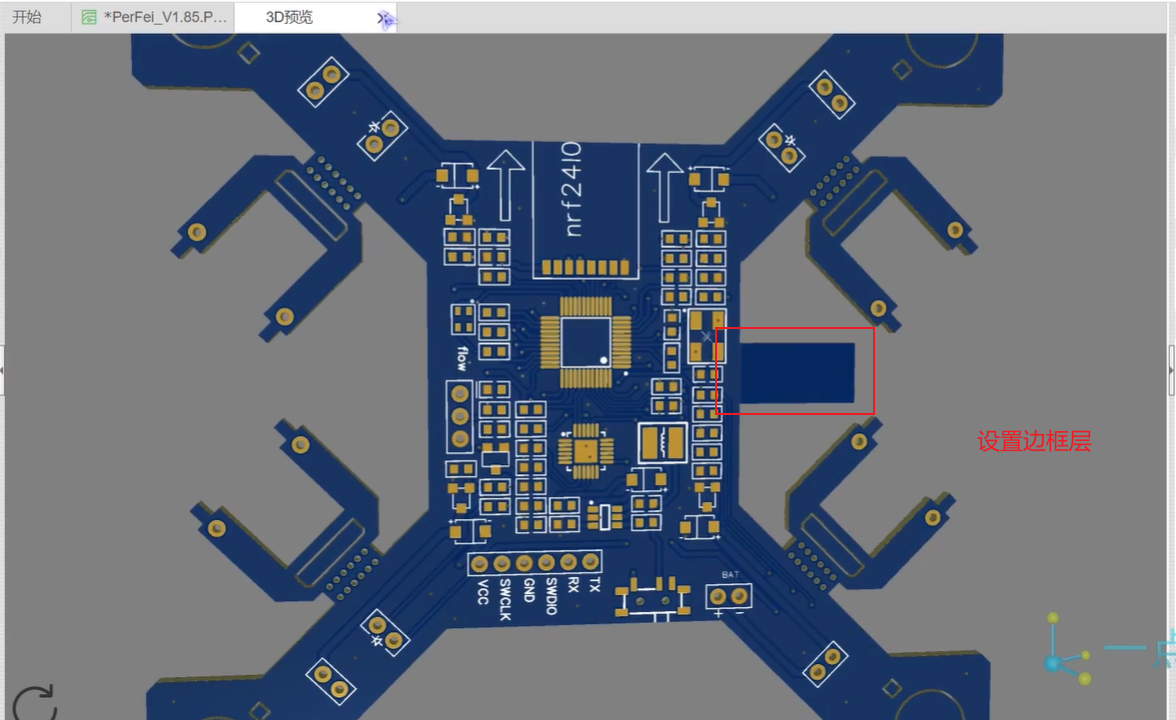
4. PCB设计
![图片[3]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401132434756-836769551.png)
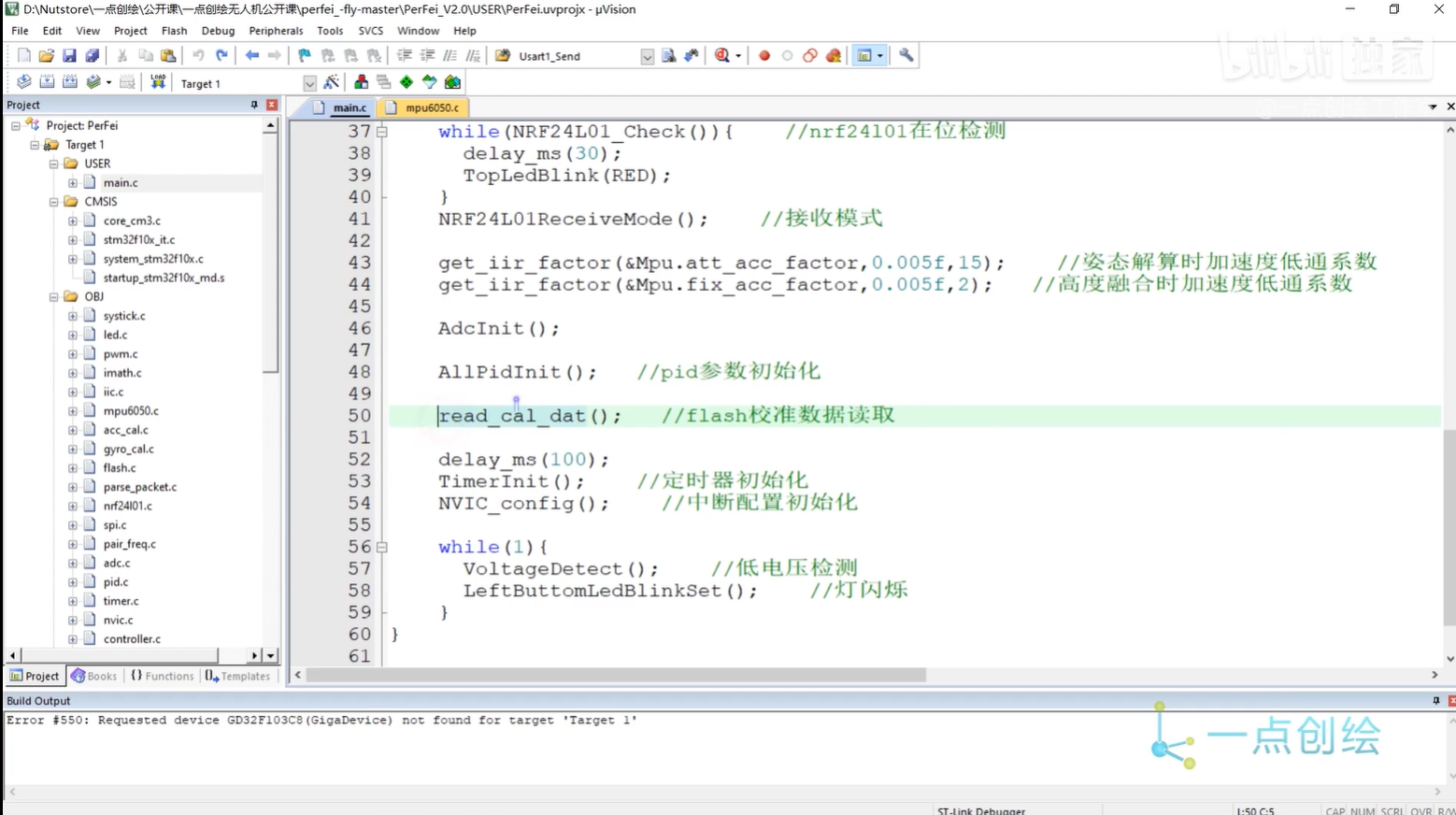
5. 单片机(软件部分)
![图片[4]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401132804212-765270588.png)
6. 获取免费开源项目
![图片[5]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401133056146-1126660828.png)
7. PCB设计
![图片[6]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401135009665-760374879.png)
![图片[7]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401134924755-1060823514.png)
![图片[8]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401135053918-255247861.png)
![图片[9]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401135258289-69760490.png)
8. 代码部分
![图片[10]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401135732516-2080011688.png)
![图片[11]-【飞控制作】从飞控制作学习项目经验 - 玄机博客-玄机博客](https://img2024.cnblogs.com/blog/1690915/202404/1690915-20240401135904549-922790053.png)
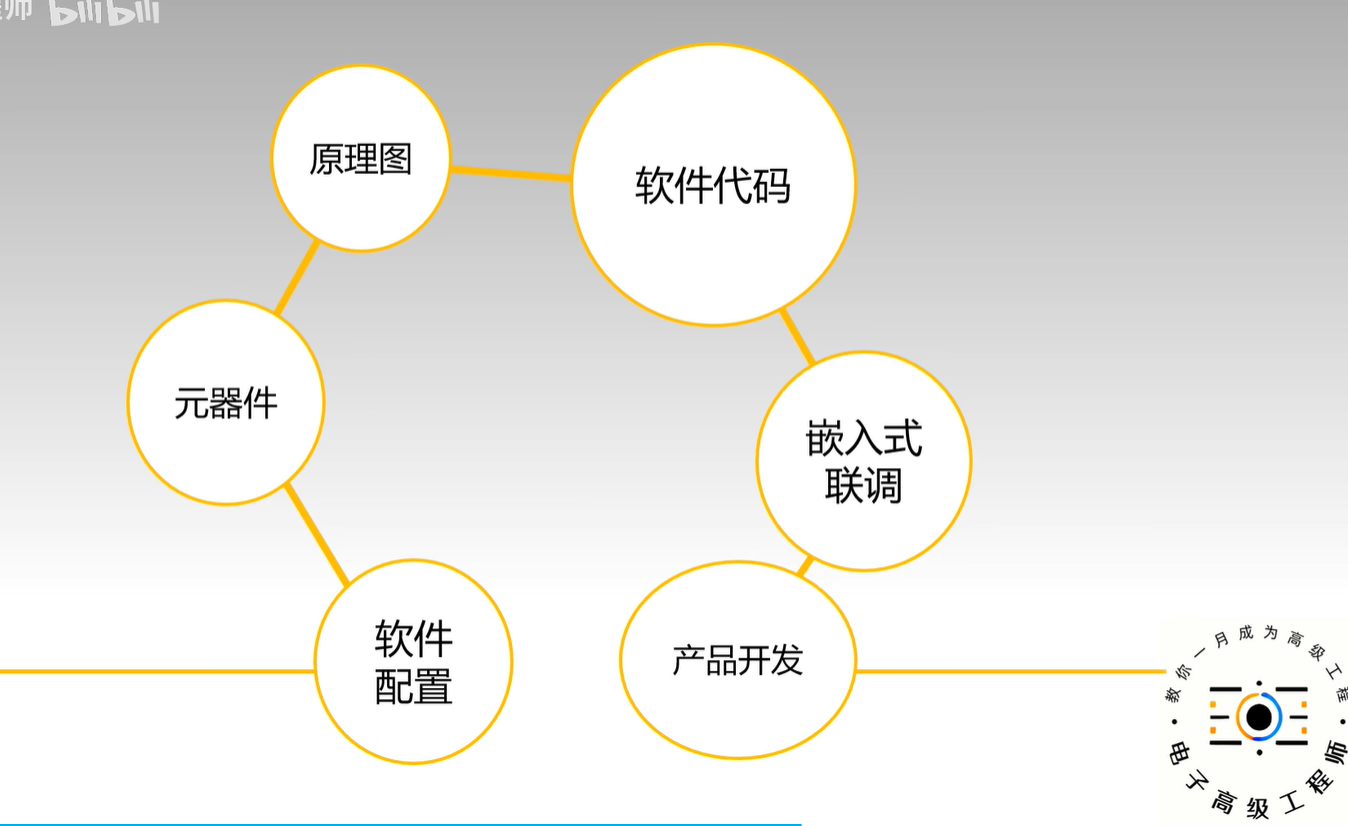
9. 开发流程图
参考:
玄机博客
© 版权声明
1.本站内容仅供参考,不作为任何法律依据。用户在使用本站内容时,应自行判断其真实性、准确性和完整性,并承担相应风险。
2.本站部分内容来源于互联网,仅用于交流学习研究知识,若侵犯了您的合法权益,请及时邮件或站内私信与本站联系,我们将尽快予以处理。
3.本文采用知识共享 署名4.0国际许可协议 [BY-NC-SA] 进行授权
4.根据《计算机软件保护条例》第十七条规定“为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可以不经软件著作权人许可,不向其支付报酬。”您需知晓本站所有内容资源均来源于网络,仅供用户交流学习与研究使用,版权归属原版权方所有,版权争议与本站无关,用户本人下载后不能用作商业或非法用途,需在24个小时之内从您的电脑中彻底删除上述内容,否则后果均由用户承担责任;如果您访问和下载此文件,表示您同意只将此文件用于参考、学习而非其他用途,否则一切后果请您自行承担,如果您喜欢该程序,请支持正版软件,购买注册,得到更好的正版服务。
5.本站是非经营性个人站点,所有软件信息均来自网络,所有资源仅供学习参考研究目的,并不贩卖软件,不存在任何商业目的及用途
THE END







暂无评论内容