
本文分享自华为云社区《确保并发执行的安全性:探索多线程和锁机制以构建可靠的程序》,作者:Lion Long。
在当今计算机系统中,多线程编程已成为常见的需求,然而,同时也带来了并发执行的挑战。为了避免数据竞争和其他并发问题,正确使用适当的锁机制是至关重要的。通过阅读本文,读者将了解到多线程和锁机制在并发编程中的重要性,以及如何避免常见的并发问题,确保程序的安全性和可靠性。通过实际案例和代码示例来说明如何正确地使用多线程和锁机制来构建可靠的程序。
一、多线程的使用
1.1、线程的创建
函数原型:
#include <pthread.h> int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine) (void *), void *arg); // Compile and link with -pthread.
描述:
pthread_create()函数在调用进程中启动一个新线程。新线程通过调用start_routine()开始执行;arg作为start_routine()的唯一参数传递。
新线程以以下方式之一终止:
(1)它调用pthread_exit(),指定一个退出状态值,该值可用于调用pthrread_join()的同一进程中的另一个线程,即pthrread_join()可以接收pthread_exit()返回的值。
(2)它从start_routine()返回。这相当于使用return语句中提供的值调用pthread_exit()。
(3)它被pthread_cancel()取消。
(4)进程中的任何线程都调用exit(),或者主线程执行main()的返回。这将导致进程中所有线程的终止。
参数介绍:
| 参数 | 含义 |
|---|---|
| attr | attr参数指向pthread_attr_t结构,其内容在线程创建时用于确定新线程的属性;使用pthread_attr_init()和相关函数初始化该结构。如果attr为空,则使用默认属性创建线程。 |
| thread | 在返回之前,成功调用pthread_create()将新线程的ID存储在thread指向的缓冲区中;此标识符用于在后续调用其他pthreads函数时引用线程。 |
| start_routine | 线程入口函数 |
| arg | 线程入口函数的参数 |
返回值:
成功时,返回0;出错时,它返回一个错误号,并且*thread的内容未定义。
错误号:
| 错误号 | 含义 |
|---|---|
| EAGAIN | 资源不足,无法创建另一个线程。 |
| AGAIN A | 遇到系统对线程数量施加的限制。可能触发此错误的限制有很多:已达到RLIMIT_NPROC软资源限制【通过setrlimit()设置】,该限制限制了真实用户ID的进程和线程数;已达到内核对进程和线程数的系统范围限制,即/proc/sys/kernel/threads max【请参阅proc()】;或者达到最大pid数/proc/sys/kernel/pid_max【见proc()】。 |
| EINVAL | 属性中的设置无效。 |
| EPERM | 没有设置attr中指定的调度策略和参数的权限。 |
其他:
新线程继承创建线程的信号掩码【pthread_sigmask()】的副本。新线程的挂起信号集为空【sigpending()】。新线程不继承创建线程的备用信号堆栈【sigaltstack()】。
新线程的CPU时间时钟的初始值为0【参见pthread_getcpuclockid()】。
示例代码:
#include <pthread.h> #include <string.h> #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <errno.h> #include <ctype.h> #define handle_error_en(en, msg) \ do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0) #define handle_error(msg) \ do { perror(msg); exit(EXIT_FAILURE); } while (0) struct thread_info { /* Used as argument to thread_start() */ pthread_t thread_id; /* ID returned by pthread_create() */ int thread_num; /* Application-defined thread # */ char *argv_string; /* From command-line argument */ }; /* Thread start function: display address near top of our stack, and return upper-cased copy of argv_string */ static void * thread_start(void *arg) { struct thread_info *tinfo = arg; char *uargv, *p; printf("Thread %d: top of stack near %p; argv_string=%s\n", tinfo->thread_num, &p, tinfo->argv_string); uargv = strdup(tinfo->argv_string); if (uargv == NULL) handle_error("strdup"); for (p = uargv; *p != '\0'; p++) *p = toupper(*p); return uargv; } int main(int argc, char *argv[]) { int s, tnum, opt, num_threads; struct thread_info *tinfo; pthread_attr_t attr; int stack_size; void *res; /* The "-s" option specifies a stack size for our threads */ stack_size = -1; while ((opt = getopt(argc, argv, "s:")) != -1) { switch (opt) { case 's': stack_size = strtoul(optarg, NULL, 0); break; default: fprintf(stderr, "Usage: %s [-s stack-size] arg...\n", argv[0]); exit(EXIT_FAILURE); } } num_threads = argc - optind; /* Initialize thread creation attributes */ s = pthread_attr_init(&attr); if (s != 0) handle_error_en(s, "pthread_attr_init"); if (stack_size > 0) { s = pthread_attr_setstacksize(&attr, stack_size); if (s != 0) handle_error_en(s, "pthread_attr_setstacksize"); } /* Allocate memory for pthread_create() arguments */ tinfo = calloc(num_threads, sizeof(struct thread_info)); if (tinfo == NULL) handle_error("calloc"); /* Create one thread for each command-line argument */ for (tnum = 0; tnum < num_threads; tnum++) { tinfo[tnum].thread_num = tnum + 1; tinfo[tnum].argv_string = argv[optind + tnum]; /* The pthread_create() call stores the thread ID into corresponding element of tinfo[] */ s = pthread_create(&tinfo[tnum].thread_id, &attr, &thread_start, &tinfo[tnum]); if (s != 0) handle_error_en(s, "pthread_create"); } /* Destroy the thread attributes object, since it is no longer needed */ s = pthread_attr_destroy(&attr); if (s != 0) handle_error_en(s, "pthread_attr_destroy"); /* Now join with each thread, and display its returned value */ for (tnum = 0; tnum < num_threads; tnum++) { s = pthread_join(tinfo[tnum].thread_id, &res); if (s != 0) handle_error_en(s, "pthread_join"); printf("Joined with thread %d; returned value was %s\n", tinfo[tnum].thread_num, (char *) res); free(res); /* Free memory allocated by thread */ } free(tinfo); exit(EXIT_SUCCESS); }
1.2、线程的终止
新线程以以下方式之一终止:
(1)它调用pthread_exit(),指定一个退出状态值,该值可用于调用pthrread_join()的同一进程中的另一个线程,即pthrread_join()可以接收pthread_exit()返回的值。
(2)它从start_routine()返回。这相当于使用return语句中提供的值调用pthread_exit()。
(3)它被pthread_cancel()取消。
(4)进程中的任何线程都调用exit(),或者主线程执行main()的返回。这将导致进程中所有线程的终止。
pthread_exit()函数原型:
#include <pthread.h> void pthread_exit(void *retval); // Compile and link with -pthread.
描述:
(1)pthread_exit()函数终止调用线程并通过retval返回一个值,该值(如果线程是可连接的)可用于调用pthrea_join()的同一进程中的另一个线程,即可被pthrea_join()接收返回值。
(2)任何由pthread_cleanup_push()建立的尚未弹出的清理处理程序都会弹出(与它们被推送的顺序相反)并执行。如果线程具有任何特定于线程的数据,则在执行清理处理程序后,将以未指定的顺序调用相应的析构函数。
(3)当线程终止时,进程共享资源(例如互斥体、条件变量、信号量和文件描述符)不会被释放,使用atexit()注册的函数也不会被调用。
(4)进程中的最后一个线程终止后,进程通过调用exit()终止,退出状态为零;因此,释放进程共享资源并调用使用atexit()注册的函数。
返回值:此函数不返回调用方。
错误:此函数始终成功。
注意:
(1)从除主线程之外的任何线程的start函数执行返回将导致隐式调用pthread_exit(),使用函数的返回值作为线程的退出状态。
(2)为了允许其他线程继续执行,主线程应该通过调用pthread_exit()而不是exit()来终止。
(3)retval指向的值不应位于调用线程的堆栈上,因为该堆栈的内容在线程终止后未定义。
pthread_cancel()函数原型:
#include <pthread.h> int pthread_cancel(pthread_t thread); // Compile and link with -pthread.
描述:
pthread_cancel()函数向线程thread发送取消请求。目标线程是否以及何时响应取消请求取决于该线程控制的两个属性:其可取消性state和type。
由pthread_setcancelstate()设置线程的可取消状态可以启用(新线程的默认状态)或禁用。如果线程已禁用取消,则取消请求将保持排队状态,直到线程启用取消。如果线程已启用取消,则其可取消性类型决定何时取消。
由pthread_setcanceltype()确定的线程的取消类型可以是异步的或延迟的(新线程的默认值)。异步可取消性意味着线程可以随时取消(通常是立即取消,但系统不保证)。延迟可取消性意味着取消将被延迟,直到线程下一次调用作为取消点的函数。pthreads()中提供了作为或可能是取消点的函数列表。
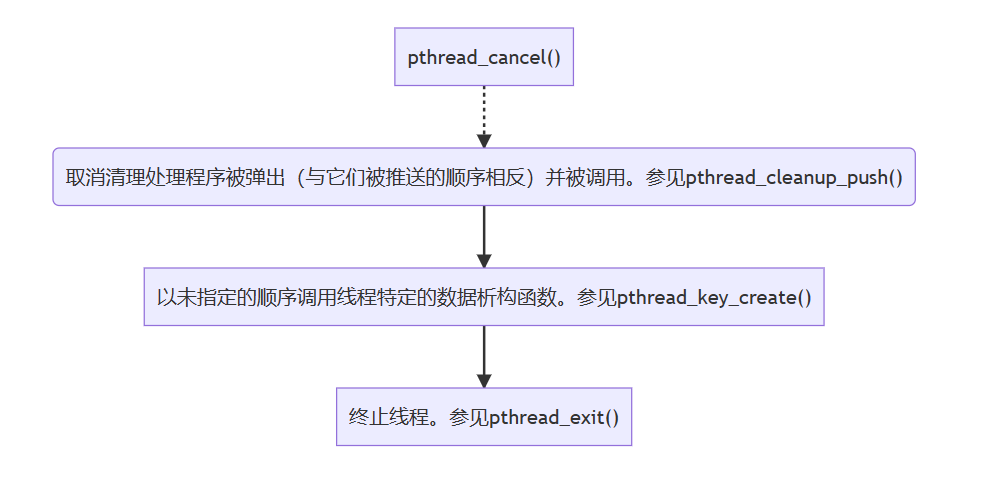
执行取消请求时,线程将执行以下步骤(按顺序):
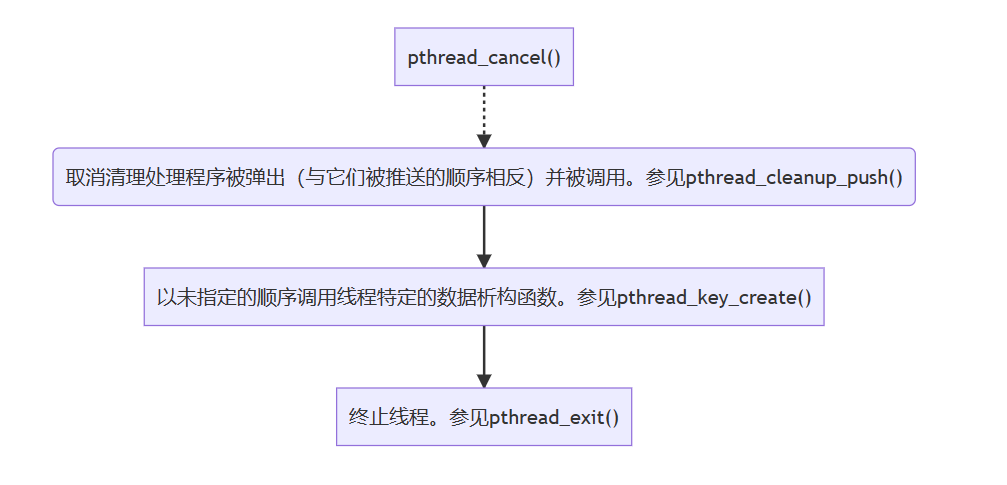 上述步骤相对于pthread_cancel()调用异步发生;pthread_cancel()的返回状态仅通知调用方取消请求是否已成功排队。
上述步骤相对于pthread_cancel()调用异步发生;pthread_cancel()的返回状态仅通知调用方取消请求是否已成功排队。
被取消的线程终止后,使用pthread_join()与该线程的连接将获得pthrea_canceled作为线程的退出状态。(使用线程连接是知道取消已完成的唯一方法。)
返回值:成功时,返回0;出错时,返回非零错误号。
错误:ESRCH,找不到ID为thread的线程。
1.3、线程的等待
函数原型:
#include <pthread.h> int pthread_join(pthread_t thread, void **retval); // Compile and link with -pthread.
描述:
pthread_join()函数等待线程指定的线程终止。如果该线程已经终止,则pthread_join()立即返回。thread指定的线程必须是可连接的。
如果retval不为空,则pthread_join()将目标线程的退出状态(即,目标线程提供给pthrea_exit()的值)复制到retval所指向的位置。如果目标线程被取消,则PTHREAD_CANCELED被置于
retval中。
如果多个线程同时尝试与同一线程联接,则结果是未定义的。如果调用pthread_join()的线程被取消,那么目标线程将保持可连接状态(即,它不会被分离)。
返回值:成功时,返回0;出错时,它返回错误号。
错误号:
| 错误号 | 含义 |
|---|---|
| EDEADLK | 检测到死锁(例如,两个线程试图彼此连接);或thread指定调用线程。 |
| EINVAL | 线程不是可连接线程。 |
| EINVAL | 另一个线程已在等待加入此线程。 |
| ESRCH | 找不到ID为线程的线程。 |
1.4、线程的属性
函数原型:
#include <pthread.h> int pthread_attr_init(pthread_attr_t *attr); int pthread_attr_destroy(pthread_attr_t *attr); // Compile and link with -pthread.
描述:
pthread_attr_init()函数使用默认属性值初始化attr指向的线程属性对象。在这个调用之后,可以使用各种相关函数(下方列出)设置对象的各个属性,然后可以在创建线程的一个或多个pthread_create()调用中使用该对象。
pthread_attr_setaffinity_np(),
pthread_attr_setdetachstate(),
pthread_attr_setguardsize(),
pthread_attr_setinheritsched(),
pthread_attr_setschedparam(),
pthread_attr_setschedpolicy(),
pthread_attr_setscope(),
pthread_attr_setstack(),
pthread_attr_setstackaddr(),
pthread_attr_setstacksize(),
pthread_create(),
pthread_getattr_np(),
pthreads()
对已初始化的线程属性对象调用pthread_attr_init()会导致未定义的行为。
当不再需要线程属性对象时,应使用pthread_attr_destroy()函数将其销毁。 销毁线程属性对象对使用该对象创建的线程没有影响。
线程属性对象被销毁后,可以使用pthread_attr_init()对其重新初始化。任何其他使用已销毁线程属性对象的方法都会产生未定义的结果。
返回值:
成功时,这些函数返回0;出错时,它们返回一个非零错误号。
错误:
在Linux上,这些函数总是成功的(但可移植和未来验证的应用程序应该处理可能的错误返回)。
pthread_attr_t类型应被视为不透明的:除通过pthreads函数外,对对象的任何访问都是不可移植的,并产生未定义的结果。
示例代码:
#define _GNU_SOURCE /* To get pthread_getattr_np() declaration */ #include <pthread.h> #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <errno.h> #define handle_error_en(en, msg) \ do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0) static void display_pthread_attr(pthread_attr_t *attr, char *prefix) { int s, i; size_t v; void *stkaddr; struct sched_param sp; s = pthread_attr_getdetachstate(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getdetachstate"); printf("%sDetach state = %s\n", prefix, (i == PTHREAD_CREATE_DETACHED) ? "PTHREAD_CREATE_DETACHED" : (i == PTHREAD_CREATE_JOINABLE) ? "PTHREAD_CREATE_JOINABLE" : "???"); s = pthread_attr_getscope(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getscope"); printf("%sScope = %s\n", prefix, (i == PTHREAD_SCOPE_SYSTEM) ? "PTHREAD_SCOPE_SYSTEM" : (i == PTHREAD_SCOPE_PROCESS) ? "PTHREAD_SCOPE_PROCESS" : "???"); s = pthread_attr_getinheritsched(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getinheritsched"); printf("%sInherit scheduler = %s\n", prefix, (i == PTHREAD_INHERIT_SCHED) ? "PTHREAD_INHERIT_SCHED" : (i == PTHREAD_EXPLICIT_SCHED) ? "PTHREAD_EXPLICIT_SCHED" : "???"); s = pthread_attr_getschedpolicy(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getschedpolicy"); printf("%sScheduling policy = %s\n", prefix, (i == SCHED_OTHER) ? "SCHED_OTHER" : (i == SCHED_FIFO) ? "SCHED_FIFO" : (i == SCHED_RR) ? "SCHED_RR" : "???"); s = pthread_attr_getschedparam(attr, &sp); if (s != 0) handle_error_en(s, "pthread_attr_getschedparam"); printf("%sScheduling priority = %d\n", prefix, sp.sched_priority); s = pthread_attr_getguardsize(attr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getguardsize"); printf("%sGuard size = %d bytes\n", prefix, v); s = pthread_attr_getstack(attr, &stkaddr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getstack"); printf("%sStack address = %p\n", prefix, stkaddr); printf("%sStack size = 0x%zx bytes\n", prefix, v); } static void * thread_start(void *arg) { int s; pthread_attr_t gattr; /* pthread_getattr_np() is a non-standard GNU extension that retrieves the attributes of the thread specified in its first argument */ s = pthread_getattr_np(pthread_self(), &gattr); if (s != 0) handle_error_en(s, "pthread_getattr_np"); printf("Thread attributes:\n"); display_pthread_attr(&gattr, "\t"); exit(EXIT_SUCCESS); /* Terminate all threads */ } int main(int argc, char *argv[]) { pthread_t thr; pthread_attr_t attr; pthread_attr_t *attrp; /* NULL or &attr */ int s; attrp = NULL; /* If a command-line argument was supplied, use it to set the stack-size attribute and set a few other thread attributes, and set attrp pointing to thread attributes object */ if (argc > 1) { int stack_size; void *sp; attrp = &attr; s = pthread_attr_init(&attr); if (s != 0) handle_error_en(s, "pthread_attr_init"); s = pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED); if (s != 0) handle_error_en(s, "pthread_attr_setdetachstate"); s = pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED); if (s != 0) handle_error_en(s, "pthread_attr_setinheritsched"); stack_size = strtoul(argv[1], NULL, 0); s = posix_memalign(&sp, sysconf(_SC_PAGESIZE), stack_size); if (s != 0) handle_error_en(s, "posix_memalign"); printf("posix_memalign() allocated at %p\n", sp); s = pthread_attr_setstack(&attr, sp, stack_size); if (s != 0) handle_error_en(s, "pthread_attr_setstack"); } s = pthread_create(&thr, attrp, &thread_start, NULL); if (s != 0) handle_error_en(s, "pthread_create"); if (attrp != NULL) { s = pthread_attr_destroy(attrp); if (s != 0) handle_error_en(s, "pthread_attr_destroy"); } pause(); /* Terminates when other thread calls exit() */ }
二、无原子操作
在多个线程中,对一个变量不断操作,如果没有原子操作会怎么样?
示例代码:
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { (*pcount)++; usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 10; i++) { printf("count = %d\n", count); sleep(1); } return 0; }
上述代码执行结果理论上是1000000,但是最后结果是994656。也就是无原子操作下的执行结果小于理论值。
原因在于,执行idx++时汇编代码是:
Mov [idx], %eax Inc %eax Mov %eax,[idx]
也就是c语言是一条语句,但真正执行时是三条命令。在无原子操作时,就可能出现如下情况:
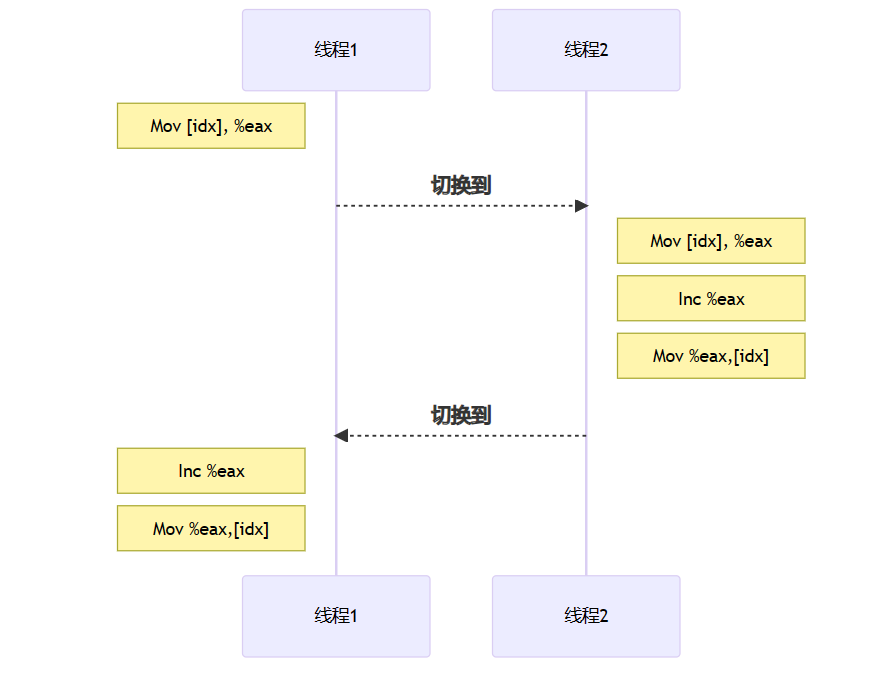
原意要自增两次,然而实际只自增了一次,因此无原子操作下的执行结果小于理论值。
三、互斥锁
让临界资源只允许在一个线程中执行。

pthread_mutex_init()
函数原型:
#include <pthread.h> int pthread_mutex_init(pthread_mutex_t *restrict mutex,const pthread_mutexattr_t *restrict attr);
函数描述:
互斥锁的初始化。
pthread_mutex_init() 函数是以动态方式创建互斥锁的,参数attr指定了新建互斥锁的属性。如果参数attr为空(NULL),则使用默认的互斥锁属性,默认属性为快速互斥锁 。
互斥锁的属性在创建锁的时候指定,在实现中仅有一个锁类型属性,不同的锁类型在试图对一个已经被锁定的互斥锁加锁时表现不同。
返回:
成功会返回零,其他任何返回值都表示出现了错误。
成功后,互斥锁被初始化为未锁住态。
pthread_mutex_destroy()
用于注销一个互斥锁,函数原型:
#include <pthread.h>
int pthread_mutex_destroy(pthread_mutex_t *mutex)
销毁一个互斥锁即意味着释放它所占用的资源,且要求锁当前处于开放状态。由于在Linux中,互斥锁并不占用任何资源,因此pthread_mutex_destroy()仅仅检查锁状态(锁定状态则返回EBUSY)。
pthread_mutex_lock()和pthread_mutex_trylock()
函数原型:
#include <pthread.h> int pthread_mutex_lock(pthread_mutex_t *mutex); int pthread_mutex_trylock(pthread_mutex_t *mutex);
描述:
互斥引用的互斥对象通过调用 pthread_mutex_lock()被锁定。如果互斥锁已被锁定,则调用线程将阻塞,直到互斥体变为可用。此操作将返回由处于锁定状态的互斥所引用的互斥对象,其中调用线程是其所有者。
函数 pthread_mutex_trylock()与 pthread_mutex_lock()相同,只是如果互斥引用的互斥对象当前被锁定(由任何线程,包括当前线程锁定),则调用将立即返回。
| 互斥类型 | 含义 |
|---|---|
| PTHREAD_MUTEX_NORMAL | 不提供死锁检测。尝试重新锁定互斥锁会导致死锁。如果线程尝试解锁它尚未锁定的互斥锁或已解锁的互斥体,则会导致未定义的行为。 |
| PTHREAD_MUTEX_ERRORCHECK | 提供错误检查。如果线程尝试重新锁定已锁定的互斥锁,则会返回错误。如果线程尝试解锁尚未锁定的互斥体或已解锁的互斥体,则将返回错误。 |
| PTHREAD_MUTEX_RECURSIVE | 互斥锁将保留锁定计数的概念。当线程首次成功获取互斥锁时,锁定计数将设置为 1。每次线程重新锁定此互斥锁时,锁定计数都会递增 1。每次线程解锁互斥体时,锁定计数都会减少 1。当锁定计数达到零时,互斥锁将可供其他线程获取。如果线程尝试解锁尚未锁定的互斥体或已解锁的互斥体,则将返回错误。 |
| PTHREAD_MUTEX_DEFAULT | 尝试递归锁定互斥会导致未定义的行为。如果互斥体未被调用线程锁定,则尝试解锁该互斥体会导致未定义的行为。如果互斥体未锁定,则尝试解锁互斥体会导致未定义的行为。 |
返回值:
如果成功,pthread_mutex_lock()和 pthread_mutex_unlock() 函数返回零。否则,将返回一个错误号以指示错误。
如果获取了互斥引用的互斥对象上的锁,则函数 pthread_mutex_trylock() 返回零。否则,将返回一个错误号以指示错误。
如果出现以下情况,pthread_mutex_lock()和pthread_mutex_trylock()函数将失败:
| 错误代码 | 含义 |
|---|---|
| EINVAL | 互斥体是使用具有值PTHREAD_PRIO_PROTECT的协议属性创建的,并且调用线程的优先级高于互斥体的当前优先级上限。 |
| EBUSY | 无法获取互斥体,因为它已被锁定。 |
| EINVAL | 互斥体指定的值不引用初始化的互斥体对象。 |
| EAGAIN | 无法获取互斥锁,因为已超过互斥锁的最大递归锁数。 |
| EDEADLK | 当前线程已拥有互斥体。 |
| EPERM | 当前线程不拥有互斥体。 |
这些函数不会返回错误代码EINTR。
pthread_mutex_unlock()
函数原型:
#include <pthread.h>
int pthread_mutex_unlock(pthread_mutex_t *mutex);
描述:
pthread_mutex_unlock() 函数释放互斥引用的互斥对象。释放互斥体的方式取决于互斥体的 type 属性。如果在调用 pthread_mutex_unlock()时,互斥所引用的互斥对象上存在阻塞的线程,从而导致互斥体变为可用,则调度策略用于确定哪个线程应获取互斥。(在PTHREAD_MUTEX_RECURSIVE互斥锁的情况下,当计数达到零并且调用线程不再对此互斥锁时,互斥锁将变为可用)。
如果信号被传递到等待互斥体的线程,则在信号处理程序返回时,线程将恢复等待互斥体,就好像它没有被中断一样。
返回值:
如果成功,返回零。否则,将返回一个错误号以指示错误。
示例代码
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #define ADD_MUTEX_LOCK 1 #if ADD_MUTEX_LOCK pthread_mutex_t mutex; #endif // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { #if 0 (*pcount)++; #elif ADD_MUTEX_LOCK pthread_mutex_lock(&mutex); (*pcount)++; pthread_mutex_unlock(&mutex); #endif usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; #if ADD_MUTEX_LOCK pthread_mutex_init(&mutex, NULL); #endif int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } return 0; }
上述代码执行结果是1000000。也就是互斥锁下的执行结果等于理论值。
五、自旋锁
自旋锁的接口和mutex类似。
函数原型:
#include <pthread.h> // 1. 销毁自旋锁 int pthread_spin_destroy(pthread_spinlock_t *lock); // 2. 初始化自旋锁 int pthread_spin_init(pthread_spinlock_t *lock, int attr); // 3. 自旋锁上锁(阻塞) int pthread_spin_lock(pthread_spinlock_t *lock); // 4. 自旋锁上锁(非阻塞) int pthread_spin_trylock(pthread_spinlock_t *lock); // 5. 自旋锁解锁 int pthread_spin_unlock(pthread_spinlock_t *lock); 以上函数成功都返回0.
示例代码
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #define ADD_MUTEX_LOCK 0 #define ADD_SPIN_LOCK 1 #if ADD_MUTEX_LOCK pthread_mutex_t mutex; #endif #if ADD_SPIN_LOCK pthread_spinlock_t spinlock; #endif // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { #if 0 (*pcount)++; #elif ADD_MUTEX_LOCK pthread_mutex_lock(&mutex); (*pcount)++; pthread_mutex_unlock(&mutex); #elif ADD_SPIN_LOCK pthread_spin_lock(&spinlock); (*pcount)++; pthread_spin_unlock(&spinlock); #endif usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; #if ADD_MUTEX_LOCK pthread_mutex_init(&mutex, NULL); #elif ADD_SPIN_LOCK pthread_spin_init(&spinlock, PTHREAD_PROCESS_SHARED); #endif int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } return 0; }
上述代码执行结果是1000000。也就是自旋锁下的执行结果等于理论值。
互斥锁与自旋锁的区别:
- 互斥锁与自旋锁的接口类似,但是底层实现有一定差异。
- mutex在发现锁已经被占用时,会让出CPU资源,然后等待有解锁时唤醒去抢锁。
- spin在发现锁已经被占用时,会一直等着,直到抢到锁。
死锁,死锁的两种情况:
(1)如果两个线程先后调用两次lock,第二次调用lock时,由于锁已被占用,该线程会挂起等待别的线程释放锁,然后锁正是被自己占用着的,该线程又被挂起不能释放锁,因此就永远处于挂起等待状态了,进入死锁。
(2)线程1和线程2。线程1获得锁1,线程2获得锁2,此时线程1调用lock企图获得锁2,结果是需要挂起等待线程2释放锁2,而此时线程2也调用了lock企图获得锁1,结果是线程2挂起等待线程1释放锁1,进入死锁。
避免死锁:
(1)共享资源操作前一定要获得锁。
(2)完成操作以后一定要释放锁。
(3)尽量短时间地占用锁。
(4)有多锁, 如获得顺序是abc连环扣, 释放顺序也应该是abc。
(5)线程错误返回时应该释放它所获得的锁。
(6)写程序是尽量避免同时获得多个锁。如果一定要这么做,所有线程在需要多个锁时都按相同的先后顺序获得锁,则不会出现死锁。
六、原子操作
原子操作就是用一条指令解决问题;多条执行命令变为一条执行命令,使其不可分割。
CAS,全称Compare And Swap。翻译过来就是先比较再赋值,顺序不可变;也就是先对比,如果值一致再赋值,如果不一致就不赋值。
常见的原子操作:
(1)加,add
(2)减,sub
(3)自增,inc
(4)自减,dec
(5)比较赋值,cas
注意,c语言的一条语句执行可能有副作用,但原子操作是没有副作用的。
示例代码:
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #include <sys/time.h> #define TIME_SUB_MS(tv1, tv2) ((tv1.tv_sec - tv2.tv_sec) * 1000 + (tv1.tv_usec - tv2.tv_usec) / 1000) // 原子操作 int inc(int *value,int add) { int old; __asm__ volatile( "lock; xaddl %2, %1;" : "=a" (old) : "m" (*value),"a"(add) : "cc","memory" ); return old; } // 10 * 1000000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 1000000) { inc(pcount, 1); //usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; // 统计执行时间 struct timeval tv_start; gettimeofday(&tv_start, NULL); int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } #if 0 // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } #else for (i = 0; i < THREAD_SIZE; i++) { pthread_join(threadid[i], NULL); // } #endif struct timeval tv_end; gettimeofday(&tv_end, NULL); int time_used = TIME_SUB_MS(tv_end, tv_start); printf("time_used: %d\n", time_used); return 0; }
总结
对临界资源操作时,常用原子操作和锁。
锁有互斥锁、自旋锁、读写锁等,其他应用程序实现的业务锁如悲观锁、乐观锁等。
在两种情况下容易陷入死锁:
(1)线程调用两次lock,第一次已经获得锁,第二次发现锁已占用进入等待,而锁是被自己占用,进入无线等待的死锁。
(2)多个线程多个锁的情况,线程1获得锁1然后请求锁2,线程2获得锁2然后请求锁1,互相等待,进入锁。
原子操作就是通过一条指令解决问题,封装的CAS将多条执行命令变为一条执行命令,使其不可分割。
1.本站内容仅供参考,不作为任何法律依据。用户在使用本站内容时,应自行判断其真实性、准确性和完整性,并承担相应风险。
2.本站部分内容来源于互联网,仅用于交流学习研究知识,若侵犯了您的合法权益,请及时邮件或站内私信与本站联系,我们将尽快予以处理。
3.本文采用知识共享 署名4.0国际许可协议 [BY-NC-SA] 进行授权
4.根据《计算机软件保护条例》第十七条规定“为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可以不经软件著作权人许可,不向其支付报酬。”您需知晓本站所有内容资源均来源于网络,仅供用户交流学习与研究使用,版权归属原版权方所有,版权争议与本站无关,用户本人下载后不能用作商业或非法用途,需在24个小时之内从您的电脑中彻底删除上述内容,否则后果均由用户承担责任;如果您访问和下载此文件,表示您同意只将此文件用于参考、学习而非其他用途,否则一切后果请您自行承担,如果您喜欢该程序,请支持正版软件,购买注册,得到更好的正版服务。
5.本站是非经营性个人站点,所有软件信息均来自网络,所有资源仅供学习参考研究目的,并不贩卖软件,不存在任何商业目的及用途













暂无评论内容