
本文分享自华为云社区《掌握死锁检测:策略和最佳实践》,作者: Lion Long。
一、背景:死锁产生原因
死锁,是指多个线程或者进程在运行过程中因争夺资源而造成的一种僵局,当进程或者线程处于这种僵持状态,若无外力作用,它们将无法再向前推进。
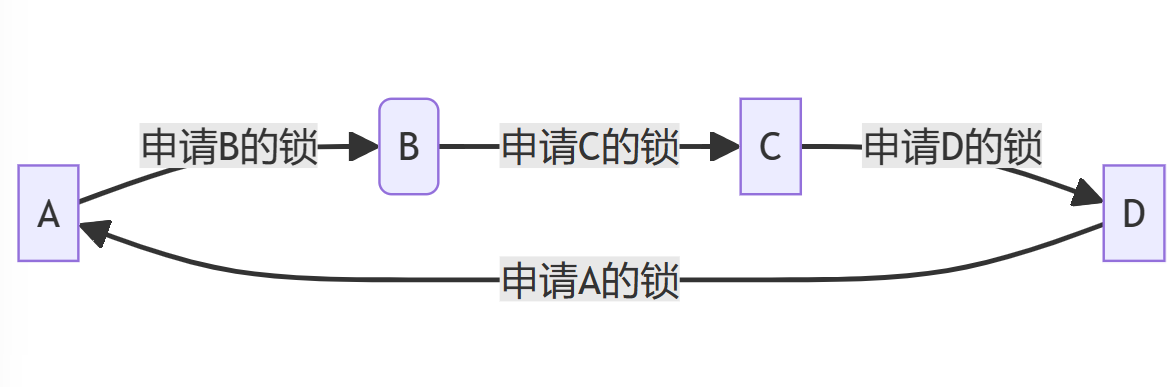
如下图所示,线程 A 想获取线程 B 的锁,线程 B 想获取线程 C 的锁,线程 C 想获取线程 D 的锁,线程 D 想获取线程 A 的锁,从而构建了一个资源获取环。

如果有两个及以上的CPU占用率达到100%时,极可能是程序进入死锁状态。
死锁的存在是因为有资源获取环的存在,所以只要能检测出资源获取环,就等同于检测出死锁的存在。

1.1、构建一个死锁
#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <pthread.h> pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex2 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex3 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex4 = PTHREAD_MUTEX_INITIALIZER; void *thread_funcA(void *arg) { pthread_mutex_lock(&mutex1); sleep(1); pthread_mutex_lock(&mutex2); printf("funcA --> \n"); pthread_mutex_unlock(&mutex2); pthread_mutex_unlock(&mutex1); } void *thread_funcB(void *arg) { pthread_mutex_lock(&mutex2); sleep(1); pthread_mutex_lock(&mutex3); printf("funcB --> \n"); pthread_mutex_unlock(&mutex3); pthread_mutex_unlock(&mutex2); } void *thread_funcC(void *arg) { pthread_mutex_lock(&mutex3); sleep(1); pthread_mutex_lock(&mutex4); printf("funcC --> \n"); pthread_mutex_unlock(&mutex4); pthread_mutex_unlock(&mutex3); } void *thread_funcD(void *arg) { pthread_mutex_lock(&mutex4); sleep(1); pthread_mutex_lock(&mutex1); printf("funcD --> \n"); pthread_mutex_unlock(&mutex1); pthread_mutex_unlock(&mutex4); } int main() { pthread_t tid[4] = { 0 }; pthread_create(&tid[0], NULL, thread_funcA, NULL); pthread_create(&tid[1], NULL, thread_funcB, NULL); pthread_create(&tid[2], NULL, thread_funcC, NULL); pthread_create(&tid[3], NULL, thread_funcD, NULL); pthread_join(tid[0], NULL); pthread_join(tid[1], NULL); pthread_join(tid[2], NULL); pthread_join(tid[3], NULL); return 0; }
二、使用hook检测死锁
hook使用场景:
(1)实现自己的协议栈,通过hook posix api。
2.1、dlsym()函数
获取共享对象或可执行文件中符号的地址。
函数原型:
#include <dlfcn.h> void *dlsym(void *handle, const char *symbol); #define _GNU_SOURCE #include <dlfcn.h> void *dlvsym(void *handle, char *symbol, char *version); // Link with -ldl.
描述:
函数dlsym()接受dlopen()返回的动态加载共享对象的“句柄”以及以空结尾的符号名,并返回该符号加载到内存中的地址。如果在指定对象或加载对象时dlopen()自动加载的任何共享对象中找不到该符号,dlsym()将返回NULL。(dlsym()执行的搜索是通过这些共享对象的依赖关系树进行的广度优先搜索。)
由于符号的值实际上可能是NULL(因此,dlsym()的NULL返回值不必指示错误),因此测试错误的正确方法是调用dlerror()以清除任何旧的错误条件,然后调用dlsym。
handle中可以指定两个特殊的伪句柄:
| 代码 | 含义 |
|---|---|
| RTLD_DEFAULT | 使用默认共享对象搜索顺序查找所需符号的第一个匹配项。搜索将包括可执行文件及其依赖项中的全局符号,以及使用RTLD_GLOBAL标志动态加载的共享对象中的符号。 |
| RTLD_NEXT | 在当前对象之后,按搜索顺序查找所需符号的下一个匹配项。这允许在另一个共享对象中为函数提供包装,例如,预加载共享对象中的函数定义可以查找并调用另一共享对象中提供的“真实”函数(或者在预加载有多层的情况下,函数的“下一个”定义)。 |
函数dlvsym()的作用与dlsym()相同,但使用版本字符串作为附加参数。
返回值:
成功时,这些函数返回与符号关联的地址。
失败时,返回NULL;可以使用dlerror()诊断错误的原因。
2.2、pthread_self()函数
获取调用线程的ID。
函数原型:
#include <pthread.h> pthread_t pthread_self(void); // Compile and link with -pthread.
说明:
函数的作用是返回调用线程的ID。这与创建此线程的pthread_create()调用中*thread中返回的值相同。
返回值:
此函数始终成功,返回调用线程的ID。
2.3、实现步骤
(1)构建函数指针
(2)定义与目标函数一样的类型
typedef int(*pthread_mutex_lock_t)(pthread_mutex_t *mutex); typedef int(*pthread_mutex_unlock_t)(pthread_mutex_t *mutex); pthread_mutex_lock_t pthread_mutex_lock_f; pthread_mutex_unlock_t pthread_mutex_unlock_f;
(3)具体函数实现,函数名与目标函数名一致
int pthread_mutex_lock(pthread_mutex_t *mutex) { pthread_t selfid = pthread_self(); printf("pthread_mutex_lock: %ld, %p\n", selfid, mutex); // ... return 0; } int pthread_mutex_unlock(pthread_mutex_t *mutex) { pthread_t selfid = pthread_self(); printf("pthread_mutex_unlock: %ld, %p\n", selfid, mutex); // ... return 0; }
(4)调用dlsym()函数,即钩子。
int init_hook() { pthread_mutex_lock_f = dlsym(RTLD_NEXT, "pthread_mutex_lock"); pthread_mutex_unlock_f = dlsym(RTLD_NEXT, "pthread_mutex_unlock"); // ... return 0; }
2.4、示例代码
#define _GNU_SOURCE #include <dlfcn.h> #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <pthread.h> typedef int(*pthread_mutex_lock_t)(pthread_mutex_t *mutex); typedef int(*pthread_mutex_unlock_t)(pthread_mutex_t *mutex); pthread_mutex_lock_t pthread_mutex_lock_f; pthread_mutex_unlock_t pthread_mutex_unlock_f; int pthread_mutex_lock(pthread_mutex_t *mutex) { pthread_t selfid = pthread_self(); pthread_mutex_lock_f(mutex); printf("pthread_mutex_lock: %ld, %p\n", selfid, mutex); return 0; } int pthread_mutex_unlock(pthread_mutex_t *mutex) { pthread_t selfid = pthread_self(); pthread_mutex_unlock_f(mutex); printf("pthread_mutex_unlock: %ld, %p\n", selfid, mutex); return 0; } int init_hook() { pthread_mutex_lock_f = dlsym(RTLD_NEXT, "pthread_mutex_lock"); pthread_mutex_unlock_f = dlsym(RTLD_NEXT, "pthread_mutex_unlock"); return 0; } #if 1 // debug pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex2 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex3 = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_t mutex4 = PTHREAD_MUTEX_INITIALIZER; void *thread_funcA(void *arg) { pthread_mutex_lock(&mutex1); sleep(1); pthread_mutex_lock(&mutex2); printf("funcA --> \n"); pthread_mutex_unlock(&mutex2); pthread_mutex_unlock(&mutex1); } void *thread_funcB(void *arg) { pthread_mutex_lock(&mutex2); sleep(1); pthread_mutex_lock(&mutex3); printf("funcB --> \n"); pthread_mutex_unlock(&mutex3); pthread_mutex_unlock(&mutex2); } void *thread_funcC(void *arg) { pthread_mutex_lock(&mutex3); sleep(1); pthread_mutex_lock(&mutex4); printf("funcC --> \n"); pthread_mutex_unlock(&mutex4); pthread_mutex_unlock(&mutex3); } void *thread_funcD(void *arg) { pthread_mutex_lock(&mutex4); sleep(1); pthread_mutex_lock(&mutex1); printf("funcD --> \n"); pthread_mutex_unlock(&mutex1); pthread_mutex_unlock(&mutex4); } int main() { init_hook(); pthread_t tid[4] = { 0 }; pthread_create(&tid[0], NULL, thread_funcA, NULL); pthread_create(&tid[1], NULL, thread_funcB, NULL); pthread_create(&tid[2], NULL, thread_funcC, NULL); pthread_create(&tid[3], NULL, thread_funcD, NULL); pthread_join(tid[0], NULL); pthread_join(tid[1], NULL); pthread_join(tid[2], NULL); pthread_join(tid[3], NULL); return 0; } #endif
缺点:这种方式在少量锁情况下还可以分析,在大量锁使用的情况,分析过程极为困难。
三、使用图算法检测死锁
死锁检测可以利用图算法,检测有向图是否有环。

3.1、图的构建
(1)矩阵
| 指向 1 | 指向 2 | 指向 3 | 指向 … | |
|---|---|---|---|---|
| 节点 1 | ||||
| 节点 2 | ||||
| 节点 3 | ||||
| 节点 … |
(2)邻接表
数据结构原理示意图:

“图”连接:

3.2、图的使用
先新增节点再新增边。
(1)每创建一个线程,新增一个节点;注意,不是线程创建的时候就要加节点(有些线程不会用到锁),而是线程调用锁(以互斥锁为例,pthread_mutex_lock() )的时候才添加节点。
(2)线程加锁(以互斥锁为例,pthread_mutex_lock() )的时候,并且检测到锁已经占用,则新增一条边。
(3)移除边,调用锁(以互斥锁为例,pthread_mutex_lock() )前,如果此时锁没有被占用,并且该边存在,则移除边。
(4)移除节点是在解锁之后。
三个原语操作:
(1)加锁之前的操作,lock_before();
(2)加锁之后的操作,lock_after();
(3)解锁之后的操作,unlock_after();
3.3、示例代码
代码比较长,为了避免篇幅较长,不利于阅读,这里没有贴上。如果需要,可以联系博主,或者关注微信公众号 《Lion 莱恩呀》 获取。
总结
死锁的产生是因为多线程之间存在交叉申请锁的情况,因争夺资源而造成的一种僵局。
hook使用:
(1)定义与目标函数一样的类型;
(2)具体函数实现,函数名与目标函数名一致;
(3)调用dlsym()函数,初始化hook。
死锁检测可以使用图算法,通过检测有向图是否有环判断是否有死锁。
1.本站内容仅供参考,不作为任何法律依据。用户在使用本站内容时,应自行判断其真实性、准确性和完整性,并承担相应风险。
2.本站部分内容来源于互联网,仅用于交流学习研究知识,若侵犯了您的合法权益,请及时邮件或站内私信与本站联系,我们将尽快予以处理。
3.本文采用知识共享 署名4.0国际许可协议 [BY-NC-SA] 进行授权
4.根据《计算机软件保护条例》第十七条规定“为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可以不经软件著作权人许可,不向其支付报酬。”您需知晓本站所有内容资源均来源于网络,仅供用户交流学习与研究使用,版权归属原版权方所有,版权争议与本站无关,用户本人下载后不能用作商业或非法用途,需在24个小时之内从您的电脑中彻底删除上述内容,否则后果均由用户承担责任;如果您访问和下载此文件,表示您同意只将此文件用于参考、学习而非其他用途,否则一切后果请您自行承担,如果您喜欢该程序,请支持正版软件,购买注册,得到更好的正版服务。
5.本站是非经营性个人站点,所有软件信息均来自网络,所有资源仅供学习参考研究目的,并不贩卖软件,不存在任何商业目的及用途














暂无评论内容