
@
目录
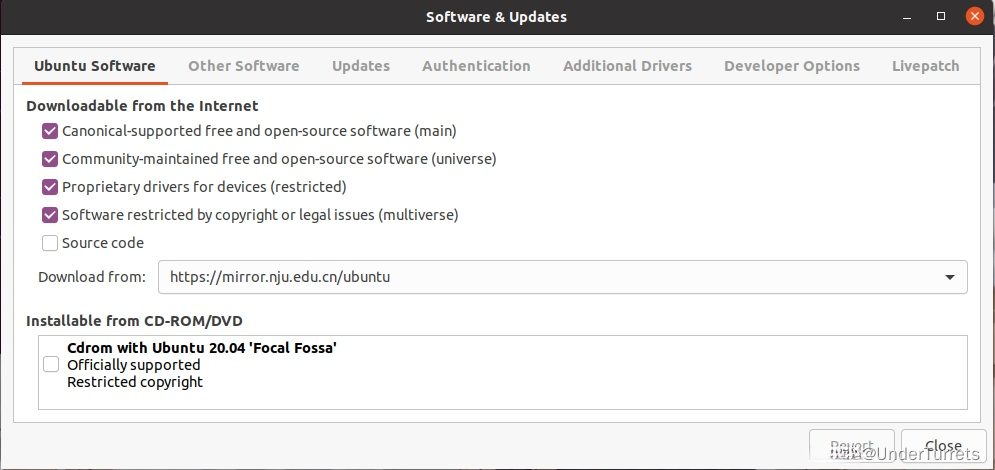
1.配置Softerware & Updates
- 如图所示配置即可

2.添加软件源
- 如果不添加软件源,是无法定位软件包的
清华源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 如果不设置key,在sudo apt update的时候会有如下问题

4.更新并安装
4.1 更新
sudo apt update
4.2 安装(ros-noetic-desktop-full)
- 如果使用apt安装,几乎百分百会出现如下问题

- 因此我们使用aptitude安装
4.2.1 安装aptitude
sudo apt install aptitude
4.2.2 安装ROS软件包
sudo aptitude install ros-noetic-desktop-full
- 接下来会列出一栏未安装的,如下图

- 切记,此时一定要选no
- 然后,aptitude会给出第二个解决方案,仍然有很多未安装的,继续选no

- 第三次,aptitude给出了满意的方案,只有一个未安装的,这时可以选yes了

5.添加环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装构建依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
7.初始化和更新
7.1 初始化
sudo rosdep init
- 由于境外资源被屏蔽,这样初始化几乎百分百会失败

7.1.1 目前可行的解决办法:重新定位资源
- 修改/usr/lib/python3/dist-packages/rosdistro/__init__.py的第68行
- 修改/usr/lib/python3/dist-packages/rosdep2/sources_list.py的第64行
- 修改/usr/lib/python3/dist-packages/rosdep2/rep3的第36行
- 修改方式:把
raw.githubusercontent.com/ros/rosdistro/master替换成gitee.com/zhao-xuzuo/rosdistro/raw/master,如下图
![图片[1]-【ROS教程】安装ROS全流程及可能遇到的问题 - 玄机博客-玄机博客](https://img2024.cnblogs.com/other/3132880/202408/3132880-20240828192440311-1166088491.png)

7.1.2 结果
sudo rosdep init
- 如果出现以下结果,则成功

7.2 更新
rosdep update
- 结果

本文由博客一文多发平台 OpenWrite 发布!
玄机博客
© 版权声明
1.本站内容仅供参考,不作为任何法律依据。用户在使用本站内容时,应自行判断其真实性、准确性和完整性,并承担相应风险。
2.本站部分内容来源于互联网,仅用于交流学习研究知识,若侵犯了您的合法权益,请及时邮件或站内私信与本站联系,我们将尽快予以处理。
3.本文采用知识共享 署名4.0国际许可协议 [BY-NC-SA] 进行授权
4.根据《计算机软件保护条例》第十七条规定“为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可以不经软件著作权人许可,不向其支付报酬。”您需知晓本站所有内容资源均来源于网络,仅供用户交流学习与研究使用,版权归属原版权方所有,版权争议与本站无关,用户本人下载后不能用作商业或非法用途,需在24个小时之内从您的电脑中彻底删除上述内容,否则后果均由用户承担责任;如果您访问和下载此文件,表示您同意只将此文件用于参考、学习而非其他用途,否则一切后果请您自行承担,如果您喜欢该程序,请支持正版软件,购买注册,得到更好的正版服务。
5.本站是非经营性个人站点,所有软件信息均来自网络,所有资源仅供学习参考研究目的,并不贩卖软件,不存在任何商业目的及用途
THE END













暂无评论内容